




My RVS – Robotic Vision System
During my study at university I developed and created a prototype robot that operated in angular coordinate system. Robot has binocular vision system that allows it to determine simple objects and shapes. Also a face recognition algorythm had developed by me. Robot has an independent control system and simple AI that allows it to take decision about it’s position and next move independently without assistance of operator. If robot notes a human face in front of it’s, it will move to human and starts to talk. A vision system that I have developed can simultaneously follows up on 3 human faces. I have developed and make all mechanics, electronics and programming for this robot.
 During working out… |
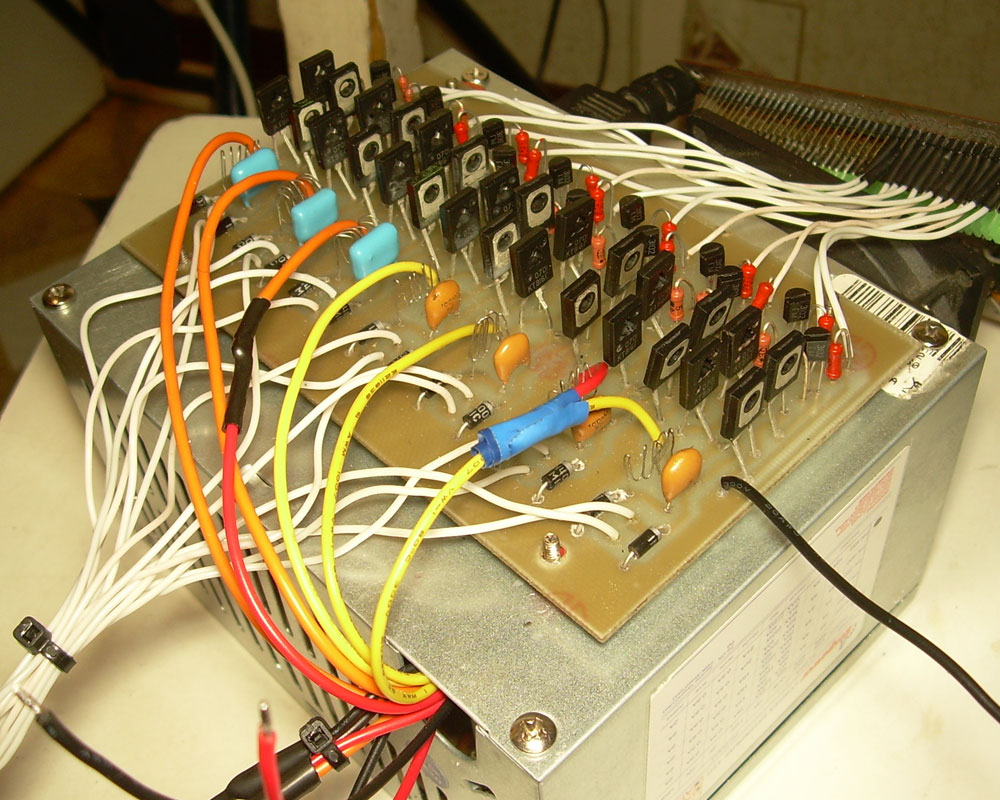 Servo’s H-bridges |
 Control system |
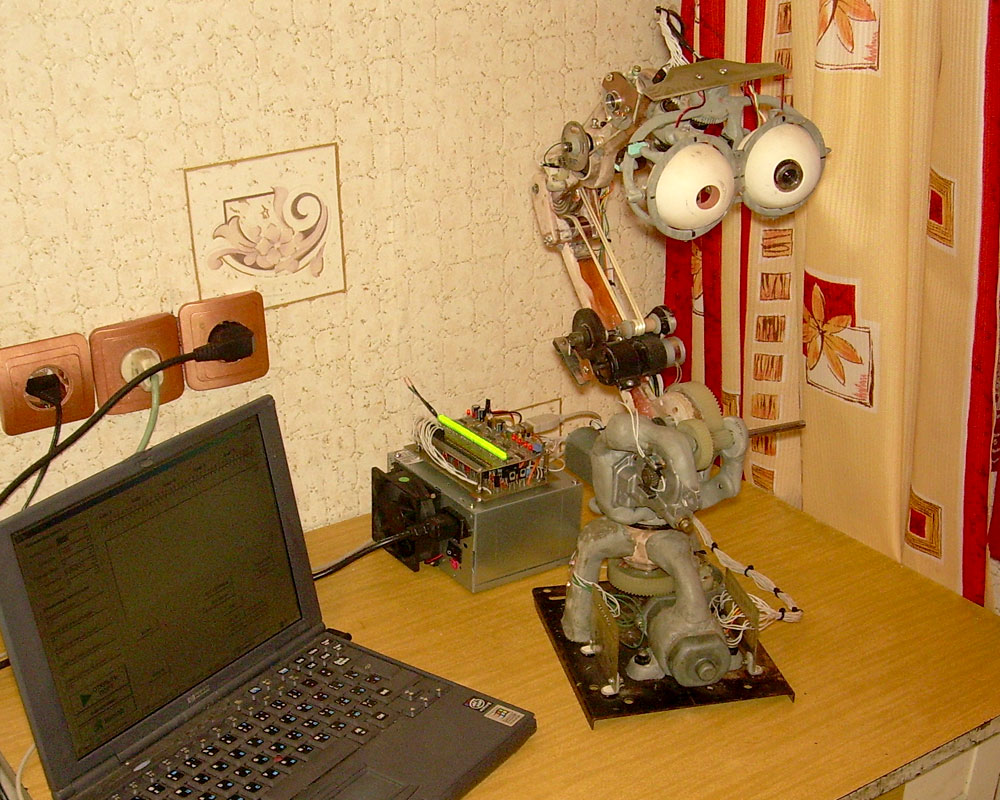 First test |
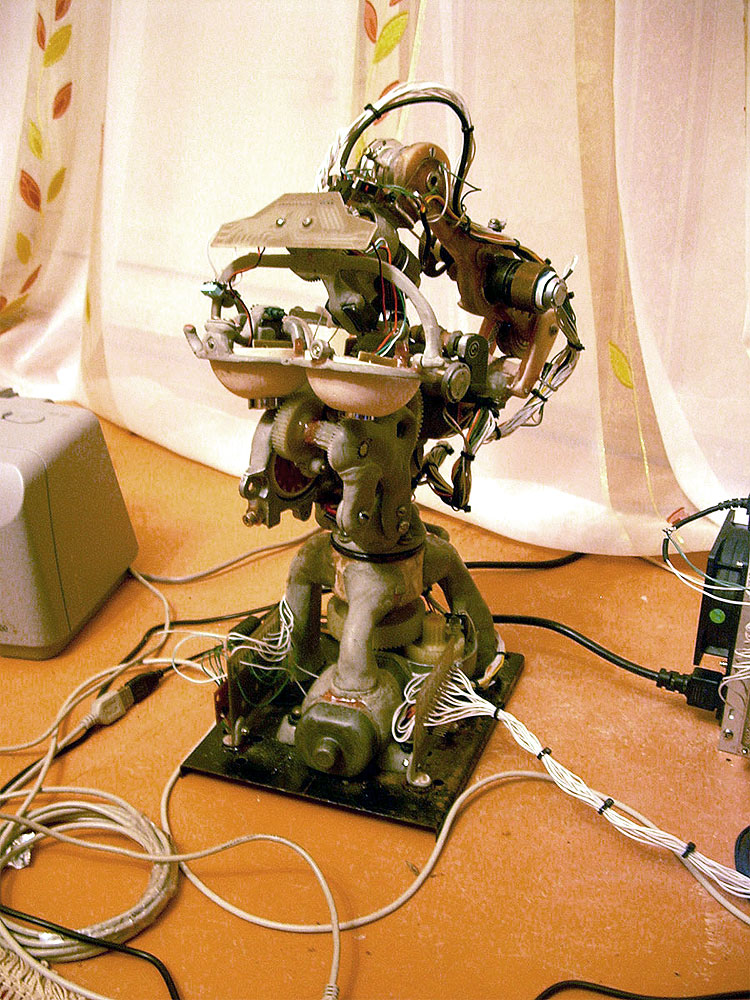 Start position |
|||||||||||||||
 Face detection test |
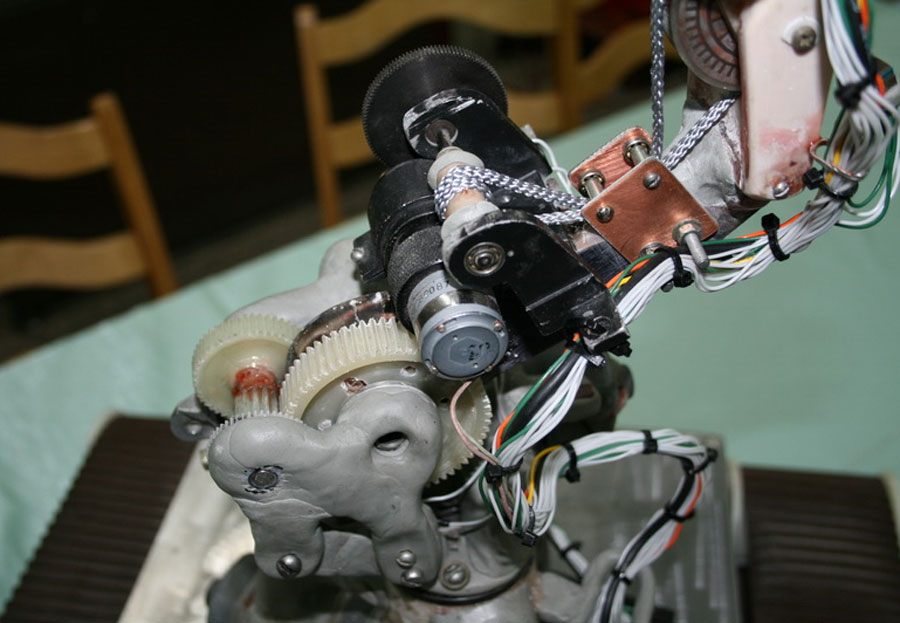 Main joint with 3 DOF |
 With me |
 Photosession |
 How robot sees |
|||||||||||||||
Robot has 2 eyes with built-in digital cameras. Control system is a computer with Windows operation system and my own program system. PC connection unit designed on FT232BM for providing USB protocol, and on 74HC595 serial to parallel shift registers for providing 40 bits parallel bus for driving servo’s H-bridges.
Here are two small video clips I recorded during developing. Sorry, no sound…
 Video 1, AVI, 2.7 Mb |
 Video 2, AVI, 740 kb |
Robot has pulse power supply on 3, 5, 12 and 18 volts.
My science work had deep resonance in national media (newspapers, science journals, TV).
 “Science and Innovations” journal cover |
 “Science and Innovations” journal article |
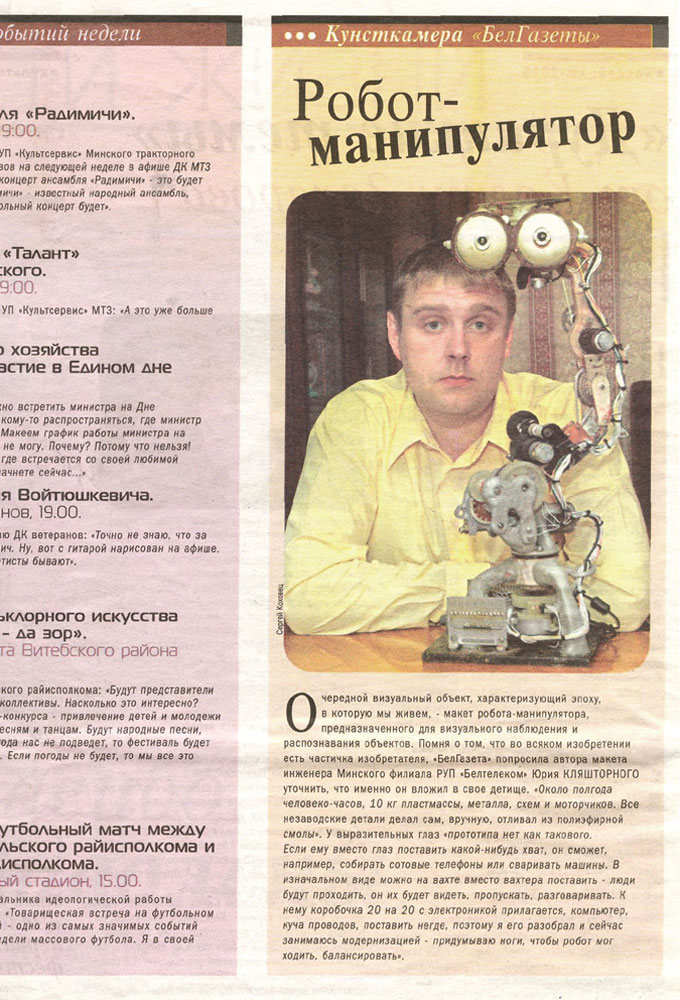
 “BelGazeta” newspaper |
|||||||||||||||||
 Big article in Beltelecom’s newspaper |
 “Respublika” newspaper |
 “Soviet Belarus” newspaper |
|||||||||||||||||